О расхождении в пробеге между спидометром и ГЛОНАСС Вы можете прочитать ЗДЕСЬ.
Основные составляющие погрешности определения уровня топлива:
1. погрешность датчика уровня топлива;
2. погрешность калибровки датчика;
3. погрешность, связанная с влиянием температуры на расширение — сжатие топлива, и различным составом топлива;
4. погрешность из-за нестабильности уровня топлива из-за наклонов, тряски транспортного средства;
5. вмешательство водителя.
- Погрешность датчика.
Емкостный ДУТ непосредственно измеряет не объем топлива в баке, а его уровень. На значение и стабильность показаний влияют радиокомпоненты электронной схемы ДУТ. Все резисторы и конденсаторы, полупроводниковые компоненты и микросхемы имеют номиналы и характеристики, которые, так или иначе зависят от температуры. Отсюда основной источник погрешности самого ДУТа – температурная нестабильность. Большинство производителей датчиков уровня топлива пытаются минимизировать данную погрешность путем разработки механизмов термокомпенсации.
Практически все производители заявляют, что суммарно погрешности эти не превышают 1%.
- Погрешность калибровки датчика.
Тарировка проводится оборудованием, которое в свою очередь имеет определенную точность. Обычно используемые счетчики имеют погрешность 0,5-1%.
- Погрешность, связанная с влиянием температуры, и вариацией состава топлива.
Суточные колебания температуры могут вызывать существенные изменения уровня топлива в баке. Ночью топливо охлаждается и его объем уменьшается, днем на солнце объем топлива увеличивается. К примеру, имеем полный бак топлива объемом 500 литров при температуре 0°С. Если нагреть топливо в баке до 20°С, то его объем составит примерно 525 литров, аналогично если его охладить до -20°С, то его объем составит примерно 475 литров. Во время заправки автомобиля, температура топлива в баке отличается от температуры заправляемого топлива, что так же вносит погрешности при измерении.
Показания ДУТа напрямую зависят от диэлектрической проницаемости топлива. А этот показатель может меняться в очень широких пределах в зависимости от наличия в топливе присадок. При одинаковом объеме летнего/зимнего дизтоплива или топлива залитого на разных заправках ДУТ на выходе будет давать разные показания. Это является основным недостатком емкостных ДУТов, их особенностью, с которой ничего нельзя сделать. Чтобы иметь более стабильные показания можно рекомендовать заправляться всегда на одних и тех же заправках одним и тем же топливом, и, что немаловажно, этим же топливом необходимо проводить тарировку топливного бака при монтаже. Кроме того, в процессе эксплуатации на внутренних стенках измерительной части ДУТ могут образовываться отложения (особенно при использовании не очень качественного топлива). В конечном итоге это приводит к тому, что диапазон показания ДУТа постепенно смещается. В итоге спустя некоторое время может потребоваться перетарировка ДУТ (или как минимум переустановка уровней пустого-полного).
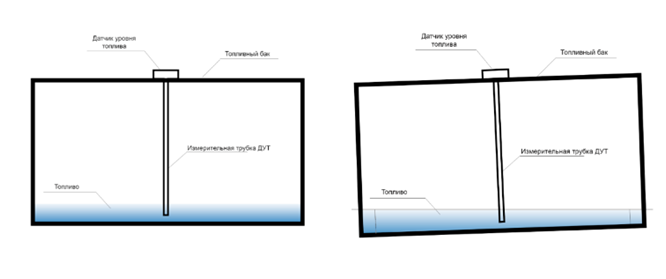
- Погрешность из-за нестабильности уровня топлива из-за наклонов, тряски транспортного средства.
Измерения уровня топлива на транспортных средствах, как правило происходят в динамике, техника перемещается – топливо в баке плескается. Конечно, и в большинстве современных ДУТов, и в ПО есть возможность применять фильтрацию, однако надо понимать, что она тоже вносит некоторую погрешность. На стационарных объектах точность определения заправок и сливов априори будет немного выше.
Стоит отметить, что при небольшом уровне топлива (менее 10%) погрешность измерений может резко возрасти. Так как топливо, даже при небольшом наклоне топливного бака, может полностью переместиться в один край бака. Подробнее на рисунках ниже.
На определение расхода, заправок и сливов влияют не только они. Заправка, определенная ДУТом (строго говоря, заправку определяет, не ДУТ, а программное обеспечение системы мониторинга) – есть результат косвенных измерений. Фактически для расчета заправки сначала определяется уровень топлива в баке до заправки, и уровень топлива после заправки. Разница между этими уровнями – и есть заправка. Соответственно, надо понимать, что оба этих уровня определяются с некоторой погрешностью, следовательно, суммарная погрешность рассчитанной заправки будет уже большей. В идеальных условиях ДУТ определит уровень до начала заправки с погрешностью 1%, определит уровень по окончанию заправки с погрешностью 1%. Очевидно, что сама заправка будет рассчитана в этом случае с погрешностью 2%. Аналогичная ситуация происходит и при расчете сливов и расхода.
Резюмируя все вышеизложенное, следует понимать, что система мониторинга с емкостным ДУТом никак не сможет на выходе обеспечить точность измерения заправок, сливов и расхода в 0,5-1%. Хорошим результатом для стационарных емкостей следует ожидать погрешность в 2-3%, для мобильных объектов 3-4%.
Вконтакте
Facebook
Google+
Одноклассники
Мой мир



















 Многие считают что
Многие считают что